
I am a PhD student major in Computer Science at Shanghai Jiao Tong University (SJTU), supervised by Prof. Yue Gao. Currently, I am conducting researches on Embodied AI at Shanghai Innovation Institute and MoE key lab of Artificial Intelligence. Previously, I received my bachelor degree in Computer Science from IEEE honor class at SJTU.
My research interest includes:
(1) Reinforcement Learning (RL) algorithms: Robust RL algorithms; Improve sample efficiency; Multi-task/Meta RL algorithms.
(2) Embodied Artificial Intelligence: Vision-Language-Action (VLA)-based robot manipulation; RL-based locomotion and imitation on legged/humanoid robots;
I am a final year CS PhD student, expected to graduate in March 2026. Currently, I am looking for a job about Reinforcement Learning or Embodied AI.
📝 Publications
🧠 Reinforcement Learning Algorithms
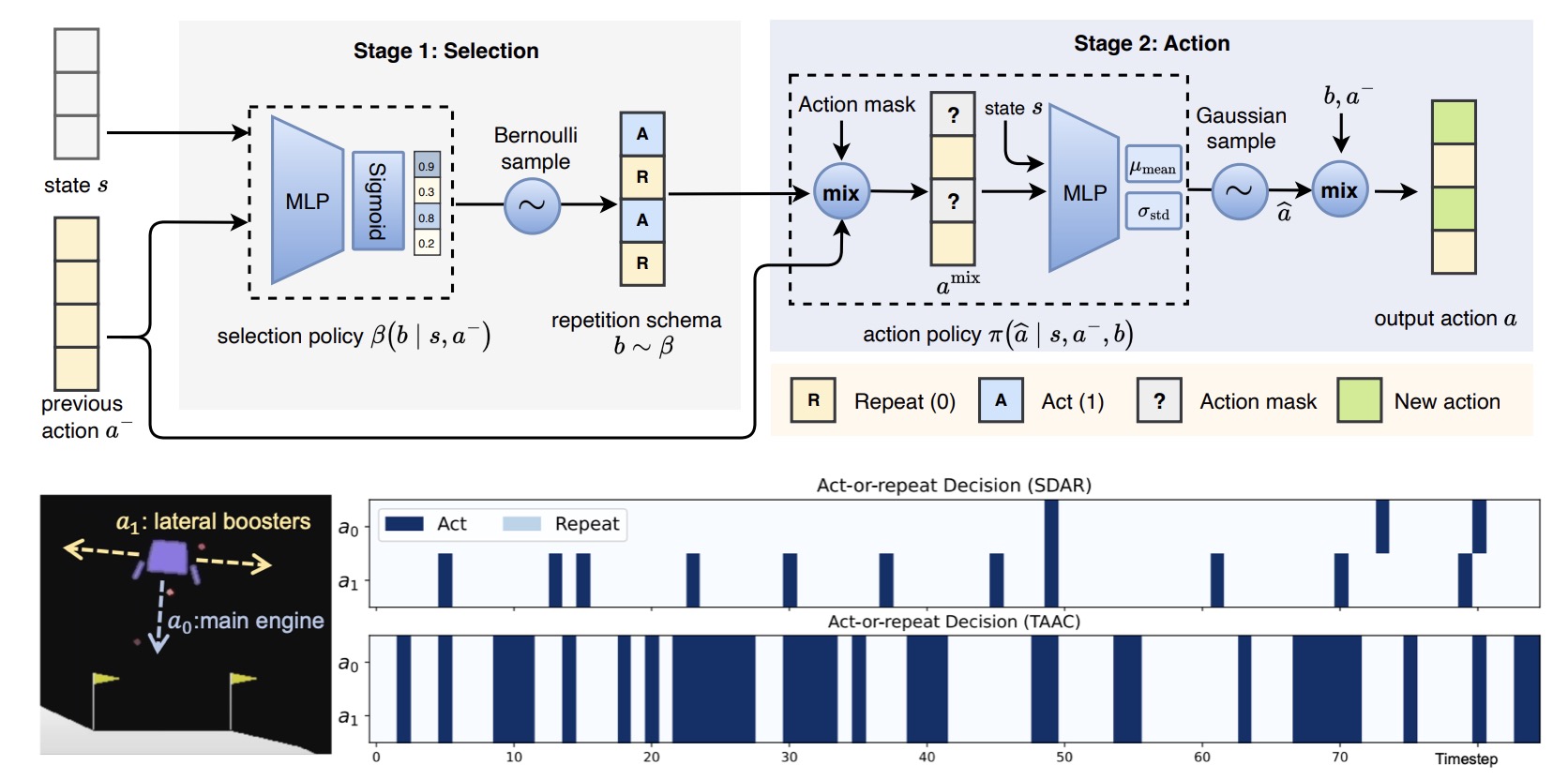
Select before Act: Spatially Decoupled Action Repetition for Continuous Control
Buqing Nie, Yangqing Fu, Yue Gao. Arxiv Openreview
- a flexible action repetition framework for continuous control.
- higher efficiency, superior performance, reduced fluctuation.
- first work to consider spatial features into temporal abstraction.
Buqing Nie, Jingtian Ji, Yangqing Fu, Yue Gao. Arxiv
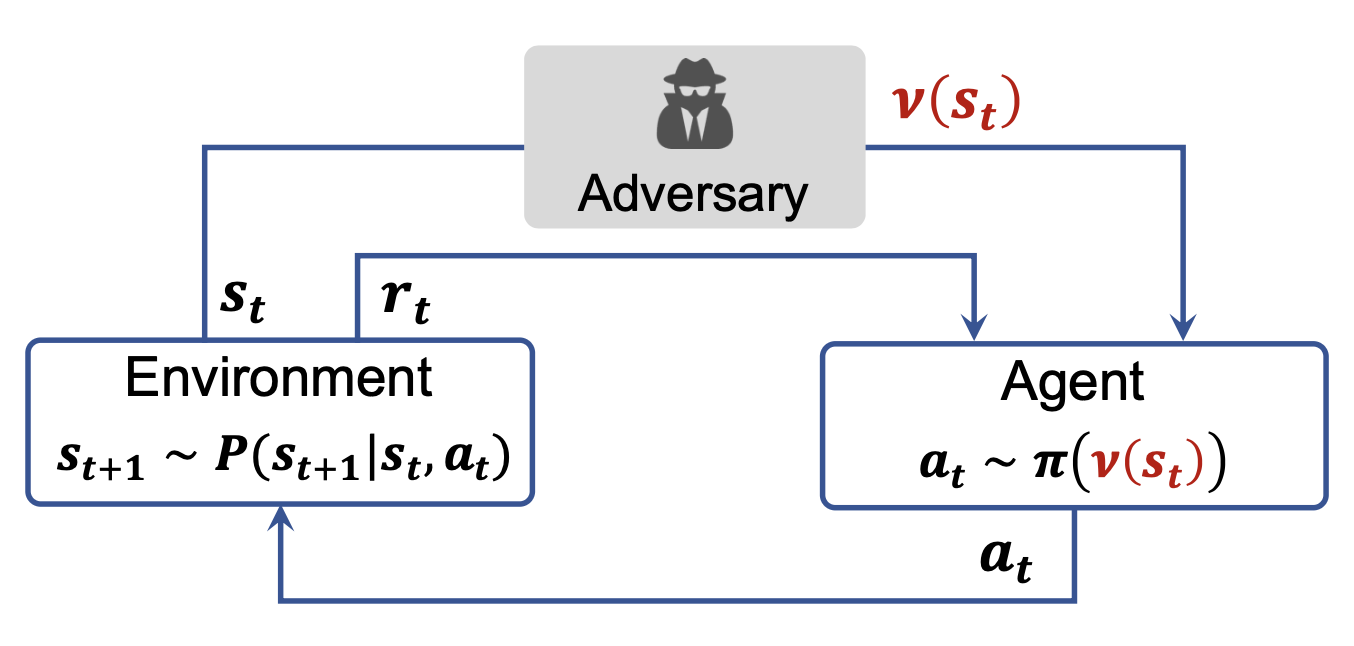
- improve certified robustness under observation adversaries.
- first work to improve robustness using Lipschitz property.
- improve performance over 20% (30% on strong perturbations).
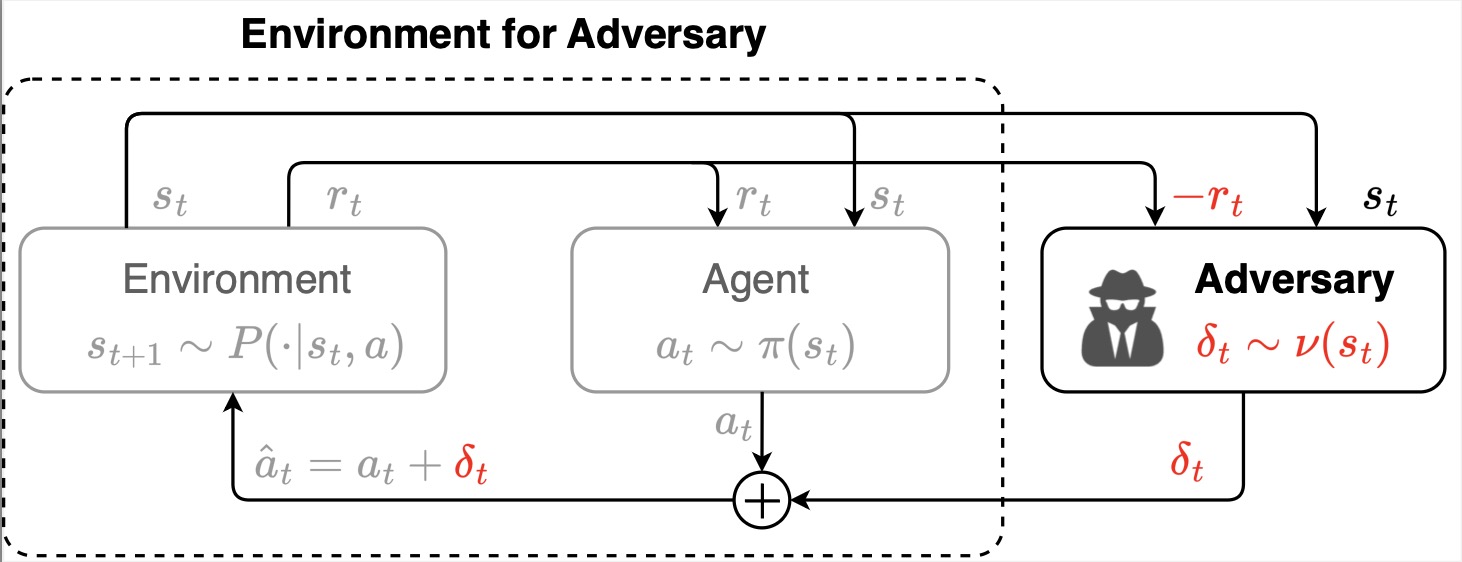
Action Robust Reinforcement Learning via Optimal Adversary Aware Policy Optimization
Buqing Nie, Yangqing Fu, Yue Gao. Arxiv
- improve robustness under various action adversaries.
- formulate and prove OA-PI framework theoretically.
- training without finding adversaries explicitly.
NeurIPS 2024Accelerating Monte Carlo Tree Search with Probability Tree State Abstraction, Yangqing Fu, Ming Sun, Buqing Nie, Yue Gao.RAL 2023DAGA: Dynamics Aware Reinforcement Learning With Graph-Based Rapid Adaptation, Jingtian Ji, Buqing Nie, and Yue Gao.Under ReviewGeneral Tree State Abstraction for Efficient Monte Carlo Tree Search with Automatic Optimization, Yangqing Fu, Ming Sun, Buqing Nie, Yue Gao.
🤖 Robotics & Embodied Artificial Intelligence
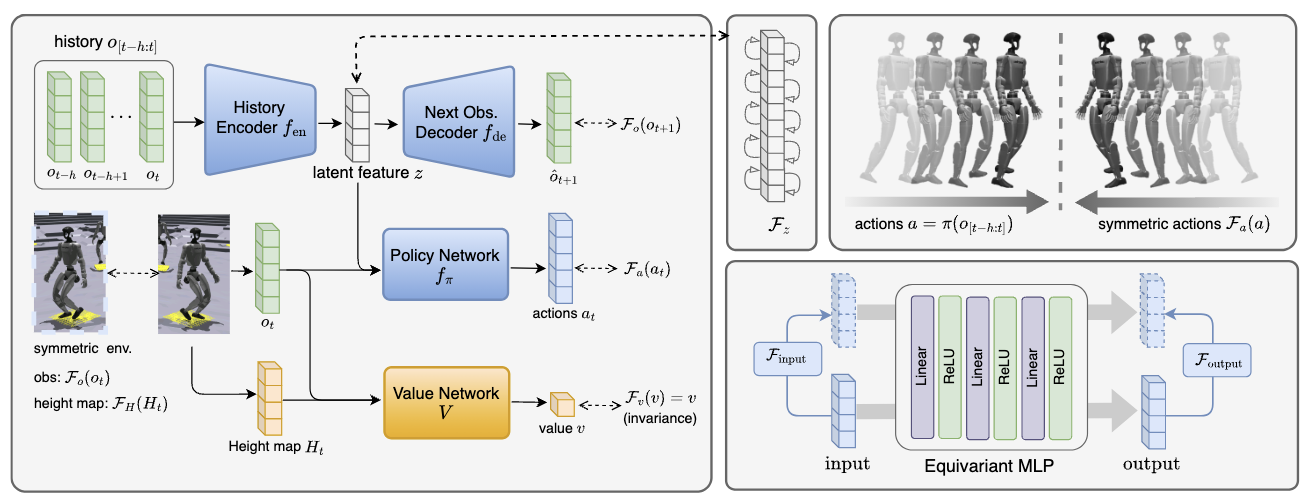
Coordinated Humanoid Robot Locomotion with Symmetry Equivariant Reinforcement Learning Policy
Buqing Nie, Yang Zhang, Rongjun Jin, Zhanxiang Cao, Huangxuan Lin, Xiaokang Yang, Yue Gao.
- DRL-based humanoid robot policy with strict symmetry equivariance.
- simple to implement without additional hyper-parameters.
- higher tracking accuracy with coordinated motions
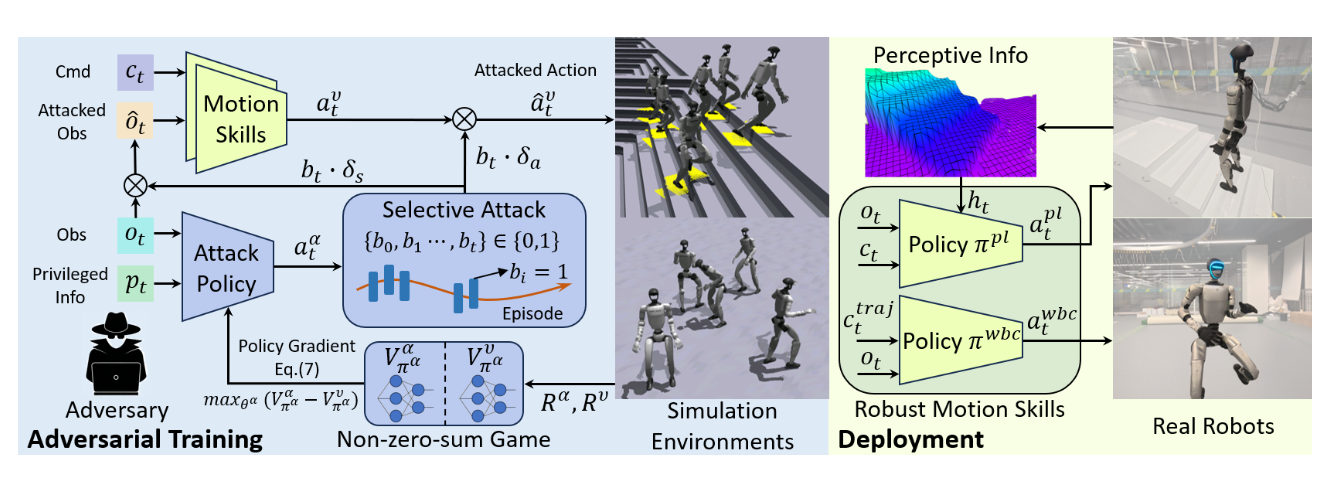
Keep on Going: Learning Robust Humanoid Motion Skills via Selective Adversarial Training
Yang Zhang, Zhanxiang Cao, Buqing Nie, Haoyang Li, Zhong Jiangwei, Qiao Sun, Xiaoyi Hu, Xiaokang Yang, Yue Gao. Paper
- Selective adversarial attack for the humanoid robot.
- Identify vulnerability and improve robustness.
- Improve long horizon mobility and tracking performance on real robot.
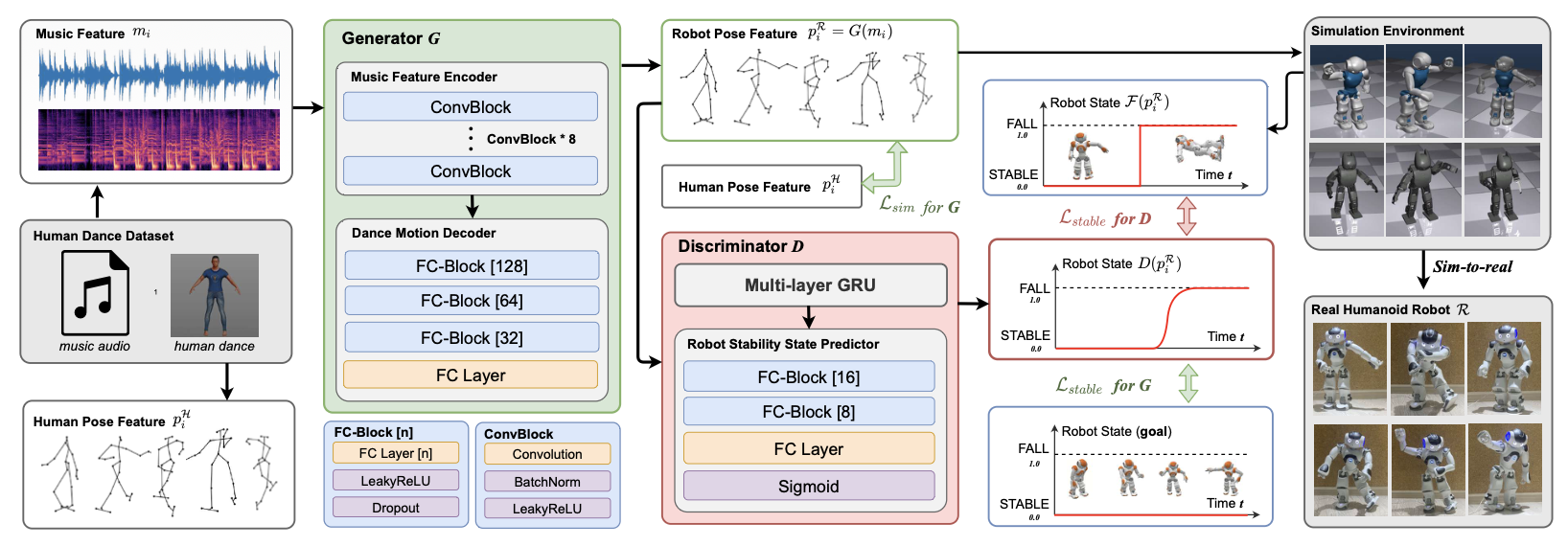
DanceHAT: Generate Stable Dances for Humanoid Robots with Adversarial Training
Buqing Nie, and Yue Gao. Paper
- humanoid robot imitation learning using adversarial training.
- first learning-based IL work for humanoid robot with stability.
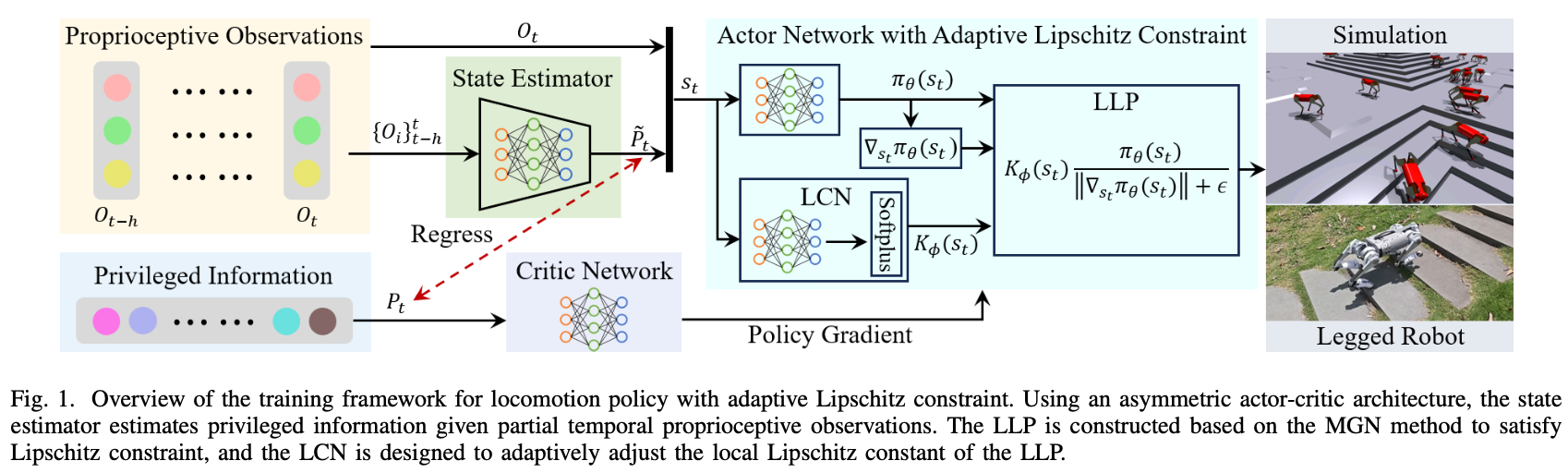
Robust Locomotion Policy with Adaptive Lipschitz Constraint for Legged Robots
Yang Zhang, Buqing Nie, and Yue Gao. Paper
- induce adaptive Lipschitz constraint for quadruped locomotion tasks
- action smooth, lower energy cost, robust to obs. noise and disturbances.
IROS 2025Minimizing Acoustic Noise: Enhancing Quiet Locomotion for Quadruped Robots in Indoor Applications, Zhanxiang Cao, Buqing Nie, Yang Zhang, Yue Gao.Under ReviewDisturbance-Aware Adaptive Compensation in Hybrid Force-Position Locomotion Policy for Legged Robots, Yang Zhang, Buqing Nie, Zhanxiang Cao, Yangqing Fu, Yue Gao.Under ReviewLearning Motion Skills with Adaptive Assistive Curriculum Force in Humanoid Robots. Zhanxiang Cao, Yang Zhang, Buqing Nie, Huangxuan Lin, Haoyang Li, Yue Gao.IJRA 2022Capability Iteration Network for Robot Path Planning, Buqing Nie, Yidong Mei, Yue Gao, Feng Gao.ROBIO 2022Structure-Aware Policy to Improve Generalization among Various Robots and Environments, Wei Xu, Yue Gao, Buqing Nie.
📖 Educations
- 2022.04 - 2026.03, PhD Candidate (combined master and doctoral program), Computer Science, Department of Computer Science, Shanghai Jiao Tong University.
- 2020.09 - 2022.04, Master, Control Science and Engineering, Department of Automation, Shanghai Jiao Tong University.
- 2016.06 - 2020.04, Bachelor, Computer Science (IEEE honor class), Department of Computer Science, Shanghai Jiao Tong University.
💻 Academic Services
I serve as a reviewer for AI/robotics conferences/journals, including ICLR 2025, NeurIPS 2025, AAAI 2025-2026, ICRA 2025, IROS 2025, RAL 2024-2025, etc.
🎖 Honors and Awards
- 2021.11 Huawei Scholarship
- 2019.05 MCM/ICM Meritorious Winner (team leader)